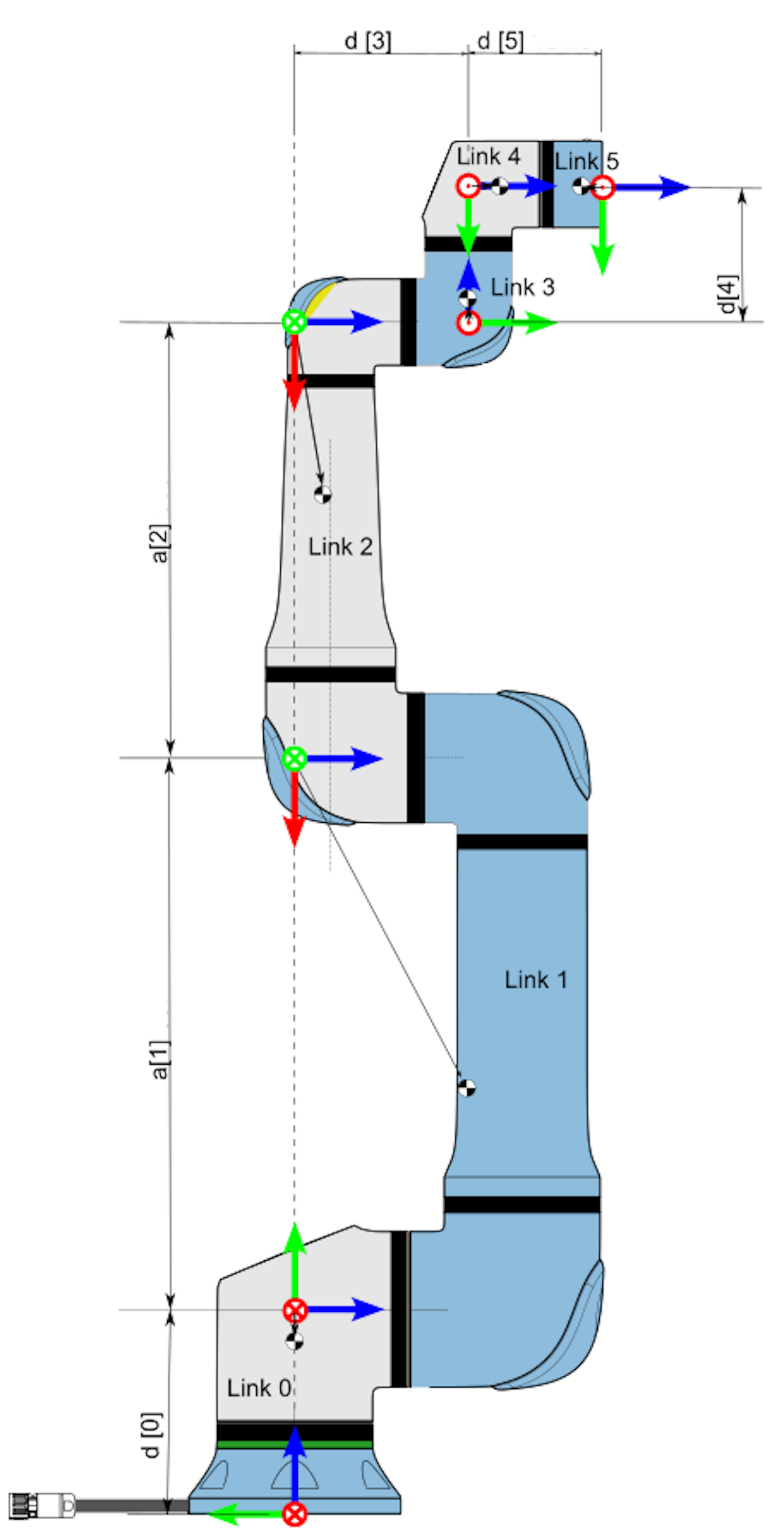
Universal Robots - DH Parameters for calculations of kinematics and dynamics